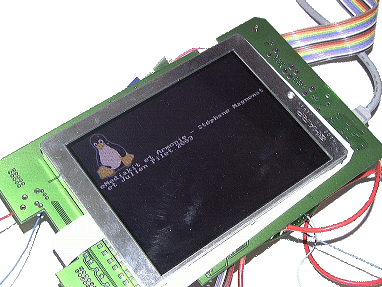
 Embedded systems
Embedded systems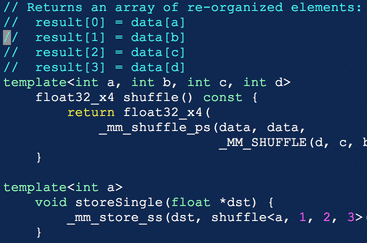 Advanced software development
Advanced software development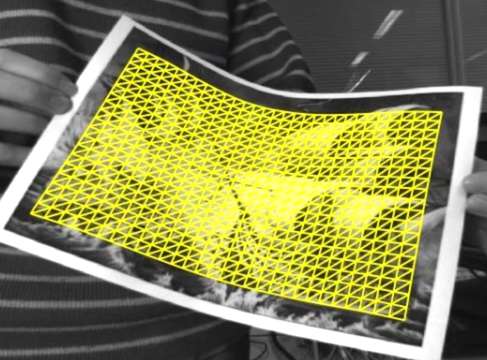 Computer vision
Computer vision Code review
Code review Scientific consulting
Scientific consultingComputer Vision is 's specialty. We particularly excel in the following domains:
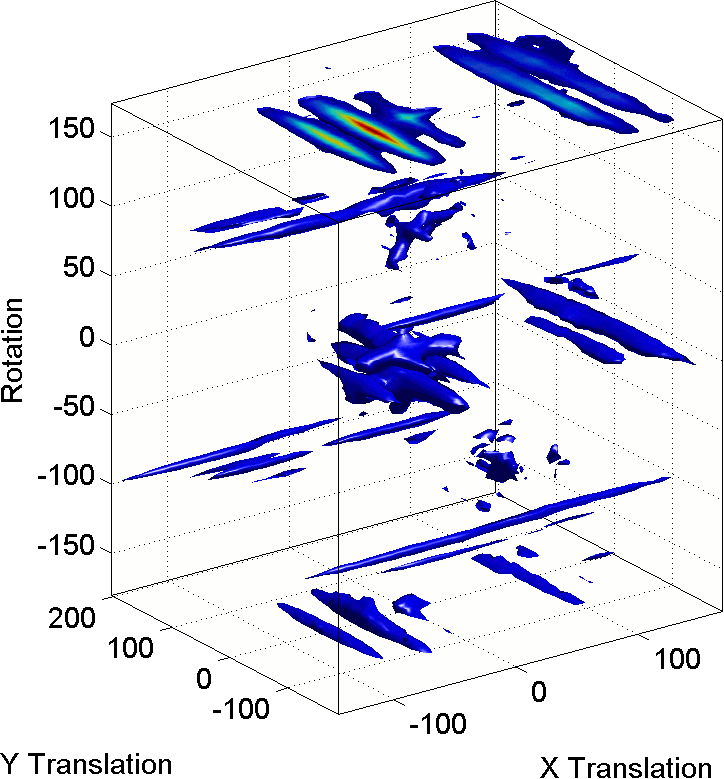
- Object detection and tracking
- Segmentation
- Camera calibration
- Image-based retrieval
- Augmented Reality
- Non-rigid objects
For performance reasons, we most of the time rely on C++, using SIMD instructions such as SSE or NEON. We also have a sound experience with OpenCV.
For a more detailed description of our expertise, see our scientific publication page!